
Projekt NextMAP

Tento článek si můžete
uložit ve formátu PDF.
V posledních letech si jistě každý povšiml významného nárůstu telematických aplikací v dopravě. Tento nárůst klade neustále větší požadavky na elektronické systémy ve vozidle, ale i na dopravní infrastrukturu vlastní.
V posledních letech si jistě každý povšiml významného nárůstu telematických aplikací v dopravě. Tento nárůst klade neustále větší požadavky na elektronické systémy ve vozidle, ale i na dopravní infrastrukturu vlastní.
Jedním ze základních předpokladů pro takovýto vývoj je existence digitálních mapových podkladů a na to úzce navazující definice jednotného standardu umožňujícího výměnu dat, jejich vizualizaci a odpovídající archivaci. Snad ani nemusí být zdůrazňováno, že toto vše je realizováno s cílem podpořit bezpečné a rychlé rozhodování řidiče. S tímto cílem byl také realizován projekt NextMAP, jehož dosavadní výsledky bych velice rád ve stručnosti přiblížil.
Jedná se o společný projekt ERTICA a společností Navigation Technologies, TeleAtlas, BMW Group, Daimler Chrysler, Jaguar, Fiat a Renault. Dvouletý projekt byl započat v lednu 2000, přičemž v současné době je k dispozici závěrečný návrh verze 1.6 z března 2002. Vedoucím projektu je Jean-Charles Pandazis (Ertico). Celkové náklady na projekt dosahují 1.8 M EUR, z toho polovina byla hrazena z fondů EU.
Předmětem projektu je posoudit technickou a ekonomickou proveditelnost rozšířených formátů mapových databází a posoudit výhody pro ITS (Intelligent Transport Systems) vozidlové systémy a zejména pak dopad na ADAS (Advanced Driver Assistance Systems).
Zpracovávaný dokument velice úzce navazuje na vytvářený standard GDF (Geographic Data Files), jež byl ve stručnosti představen čtenářům Silničního obzoru v č. 7/2001. Dokument NextMAP tento standard rozšiřuje o další aspekty využitelné v dopravně-telematických aplikacích:
- Topologický liniový model a související geometrická zpřesnění
- Atributy a relační vztahy mostních a jiných „nadzemních“ silničních konstrukcí
- Řízení dopravy pomocí SSZ (světelného signalizačního zařízení)
- Regulace rychlosti
- Tramvajová křížení; Přechody pro pěší;…
Topologický liniový model
Předmětem topologického liniového modelu je presentovat topologické liniové informace v digitálních silničních databázích. V navrženém datovém modelu jsou liniové informace přiřazeny silničním prvkům ve formě jednoduchých či složených atributů. Jedním z takovýchto atributů je „Počet jízdních pruhů“. Další informace o jízdním pruhu jsou popsány atributem „Lane Info“. Podatributy tohoto atributu jsou:
- Direction Category – je stanoven v souladu s odpovídajícím vodorovným dopravním značením (šipka vlevo,…)
- Width – stanoví šířku jízdního pruhu v cm
- Lane Type – specifikuje typ jízdního pruhu (odbočovací, připojovací,…)
- Divider - stanovuje typ použité středové dělící čáry. Je složen z dalších atributů: Divider Marking, Divider Colour, Divider Impact.
Topologický liniový model je znázorněn na obr. 1.
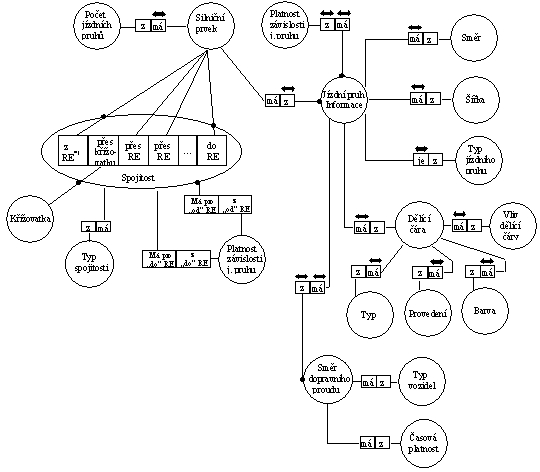
Obr. 1: Topologický liniový model znázorněný pomocí NIAM modelu (Nijssens Information Analysis Method)
Geometrické charakteristiky liniových modelů:
Mezi geometrické aspekty popisující liniové geoprvky patří zejména středová dělící čára. Výrazná pozornost je věnována požadované absolutní geometrické přesnosti.
Tabulka 1 přináší informativní hodnoty požadavků kladených na digitální mapové podklady (pro účely varovných a informačních systémů).
| Požadavky na digitální mapové podklady | Generace map | |||
|---|---|---|---|---|
| 2000 | 2004 | 2008 | 2012 | |
| Polohová přesnost | ||||
| Geometrická přesnost | ||||
| Doplňkové informace: | ||||
| - Objekty v mapě | ||||
| - Uliční informace | - | |||
| - Dopravní regulace a značení | - | |||
Příklad přechodu středových dělících čar v oblasti odbočovacího a připojovacího jízdního pruhu je znázorněn na obrázku 2.
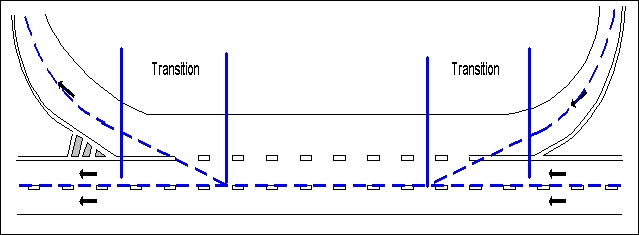
Obr. 2: Příklad přechodové oblasti při změně jízdního pruh - datový model
V tabulce 2 je znázorněn příklad navržených atributů definovaných pro topologický liniový model.
| Název atributu | Typ | Obor hodnot | Poznámka |
|---|---|---|---|
| Number of Lanes (Počet j. pruhů) |
Číselný | Integer | viz GDF3.0 & 4.0 |
| Lane Info (Informace o jízdním pruhu) |
Složený | nové | |
| Lane Type (Kategorie jízdního pruhu) |
Kód | 1 = vyhrazený jízdní pruh (sanitní vozy, policie,..) 2 = připojovací/odbočovací pruh 3 = řadící 4 = odstavný 5 = předjížděcí |
nové |
| Width (Šířka) |
Číselný (cm) | Integer | viz GDF3.0 & 4.0 |
| Direction Category (Směr) |
Kód | 0 = žádný směr nevyhrazen 1...7 = reservováno 8 = rovně 32 = vpravo 128 = zpět 512 = vlevo,… Kombinace je možná, př. značení rovně a vlevo může být uloženo jako 520 (8+512). |
viz GDF3.0 & 4.0; rozšířeno |
| Lane Divider Colour (Barva dělící čáry) |
Kód | 1 = bílá 2 = žlutá |
nové |
| Divider Marking (Typ dělící čáry) |
Kód | 0 = žádné značení 1 = přerušovaná čára 2 = dvojitá souvislá čára,…. |
nové |
| Vehicle Type (Typ vozidla) |
Kód | 0 = všechna vozidla 11 = osobní vozidla 12 = residentní vozidla ... |
viz GDF3.0 & 4.0 |
Atributy a relační vztahy mostních a jiných „nadzemních“ silničních konstrukcí
Jedná se o silniční prvky jež jsou zcela situovány pod silniční mostní konstrukcí (viaduct,…), jejichž šířku můžeme považovat za nevýznamnou. Jedním z takovýchto atributů popisující zmíněný silniční prvek je „Structure Abutment“ (mostová podpěra resp. nosník), jež se s ohledem na vlastní lokalizaci může vyskytovat opakovaně. V tabulce 3 jsou uvedeny příklady navržených atributů.
| Název atributu | Typ | Obor hodnot | Poznámka |
|---|---|---|---|
| Road Under Structure (Vozovka pod silniční konstrukcí) |
Kód | 0 = Silniční prvek není umístěn pod silniční konstrukcí 1 = Silniční prvek je zcela umístěn pod silniční konstrukcí |
nové |
| Structure Abutment (Mostová podpěra) |
Kód | 1 = mostová podpěra vlevo od silničního prvku 2 = mostová podpěra vpravo od silničního prvku 3 = komunikace rozdělena částmi mostové podpěry |
nové |
Reálný příklad mostní konstrukce je znázorněn na obrázku 3.

Obr. 3: Reálná situace případu Vozovka pod silniční konstrukcí, Praha 9
Silniční konstrukce situované podél komunikace:
Jedná se o svislé dopravní značení (jejich nosné konstrukce) jež zcela či částečně zasahují do silničního profilu, lávky pro pěší, železniční či silniční mosty jejichž šířku můžeme považovat za nevýznamnou.

Obr. 4: Příklad reálného umístění dopravních informačních tabulí a odpovídající representace v databázi, Praha 9
Řízení dopravy pomocí SSZ
V rámci datového modelu řízení dopravy pomocí světelného signalizačního zařízení jsou specifikovány dopravní směry jež přísluší jednotlivým světelným návěstidlům, vlastní poloha návěstidla a silniční prvek z jehož směru řidič k dané křižovatce přijíždí. Příklad navržených atributů definovaných pro potřeby řízení SSZ je obsažen v tabulce 4.
| Název atributu | Typ | Obor hodnot | Poznámka |
|---|---|---|---|
| Road Furniture Position (Pozice SSZ) |
Kód | 1 = napravo od komunikace 2 = nalevo od komunikace 4 = nad komunikací Kombinace je možná, př. umístění SSZ vpravo nahoře nad komunikací může být uloženo do databáze jako 5 (= 1+4) |
nové |
| Direction Category (Směr) | Kód | viz tab. 2 | viz GDF3.0 & 4.0; rozšířeno |
Na obrázku 5 je znázorněna reálná situace čtyřramenné průsečné křižovatky řízené SSZ.
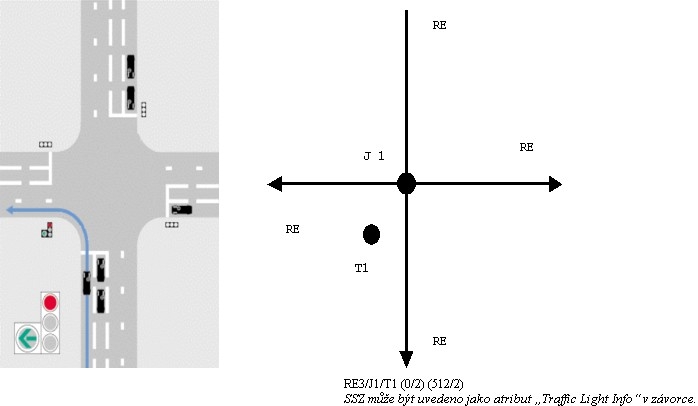
Obr. 5: Příklad řízení dopravy pomocí SSZ
Dopravní značení podél silničního tělesa využívá shodnou filozofii zápisu. Pro tyto účely je definován relační vztah „Traffic Sign along Road Element“, jež specifikuje spojení dopravního značení a příslušného silničního prvku. Silniční infrastruktura pak kvalitativně vyjadřuje lokalizaci dopravního značení. Detailnější informace o poloze mohou být přičleněny modelováním dopravního značení do obsahu informace o poloze.
Regulace rychlosti
V navrženém datovém modelu je pojem regulace rychlosti popsán následovně:
- Rychlostní omezení: reálná hodnota rychlostního limitu reprezentující rychlostní omezení v měřitelných jednotkách.
- Časová platnost: specifikuje, kdy rychlostní limit je/není aktivní (př. v zimě,…)
- Směr: v rámci silničního prvku specifikuje směr, na nějž se rychlostní limit vztahuje
- Typ vozidel: na jaká se rychlostní limit vztahuje
Měrné jednotky (např. km/h či mph) by měly být definovány prostřednictvím atributu příslušného k dané správní oblasti. Pro potřeby popisu proměnného dopravního značení (jehož model je definován v rámci GDF) je navrženo, aby jednotlivé hodnoty proměnného dopravního značení byly modelovány jako dynamické informace, jež by mohly být znázorněny v rámci proměnného dopravního značení.
Navržené atributy definované pro účely regulace rychlosti jsou obsaženy v tabulce 5.
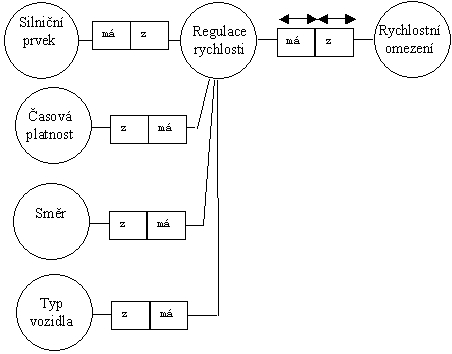
Tab. 5: Datový model Regulace rychlosti
Závěrem tohoto krátkého představení projektu NextMAP zmiňme výčet aplikací jež rozšířené databáze využívají (viz. tabulka 6):
| Aplikace | ||
|---|---|---|
| Podélné řízení | Adaptivní řízení (ACC) | Automatická kontrola s ohledem na rychlost a odstup vpředu jedoucích vozidel |
| Adaptivní řízení nastavení světlometů | Dynamické ovládání světlometů | |
| Varovné rychlostní systémy | Varují před průjezdem zatáčkou nepřiměřenou rychlostí | |
| Zlepšení dohlednosti | Systémy zvyšující dohlednost v nepříznivých světelných a klimatických podmínkách | |
| Vizuální a akustická signalizace řidiči | Systémy poskytují vizuální a akustické informace varující před výskytem potencionálně nebezpečných míst | |
| Varovné protikolizní systémy | Varují řidiče před možností kolize | |
| Příčné řízení | Varování před změnou směru | Varují řidiče před nezáměrnou změnou směru |
| Asistent „držení jízdní stopy” | Napomáhá řidiči zachovat jízdní dráhu vozidla | |
| Asistent změny směru | Informuje řidiče o vozidlech v sousedních jízdních pruzích | |
| Autonomní řízení | Podporuje plně automatické řízení | |
![]() Centrum dopravního výzkumu v.v.i.
Centrum dopravního výzkumu v.v.i.
Komentáře
Abyste mohli přidávat komentáře k tomuto článku, musíte být přihlášeni.
Klíčová slova:
Popis: Projekt NextMAP